Колесатова О. С., Красавин А. В., Технический университет УГМК, г. Верхняя Пышма, Россия
В последние годы в связи с технологическим прогрессом для производства сьёмок используют фотограмметрические методы с применением беспилотных летательных аппаратов (БПЛА), главным преимуществом которых является возможность выполнения оперативного контроля работы горного предприятия, определения объёмов складов и отвалов посредством получения трёхмерной цифровой модели.

DJI Phantom 4 RTK
В настоящее время аэрофотосъемка с использованием БПЛА проводится для создания топографической продукции масштабов 1:5000–1:500, в связи с чем была разработана технологическая схема выполнения маркшейдерских съемочных работ на открытых разработках с применением DJI Phantom 4 RTK + D-RTK 2 Mobile Station Combo (рис. 1).
Phantom 4 RTK — компактный и точный дрон DJI для создания крупномасштабных планов и карт, работающий на небольших высотах. В дрон встроен модуль RTK, который обеспечивает получение данных позиционирования в режиме реального времени с точностью до сантиметра и с минимальной абсолютной погрешностью метаданных изображения.
Под приемником RTK расположен модуль спутниковых систем позиционирования, обеспечивающий стабильность полета в местности даже со слабым сигналом, например в крупных городах или на промышленных площадках предприятий.
Технологическая схема разработана на основании инструкций и с учетом требований к точности планов масштабов 1:500–1:5000, в которых составляются основные маркшейдерские чертежи.
Технологическая схема
1. Подготовительные работы
1.1. Закладка пунктов планово-высотного обоснования (ПВО)
1.2. Планирование аэрофотосъемки.
2. Полевые работы
2.1. Геодезические
— определение координат ПВО и контроль их положения
2.2. Аэросъемочные
— подготовка БПЛА
— создание полетного задания
— выполнение съемки
3. Обработка результатов полевых работ
3.1. Вычисление координат ПВО
3.2. Создание цифровой модели объекта (ЦМО)
С целью апробирования разработанной технологической схемы проведен комплекс работ на открытом складе (рис. 2).

Было запланировано несколько полетов с высот 75, 100 и 125 м над складом.
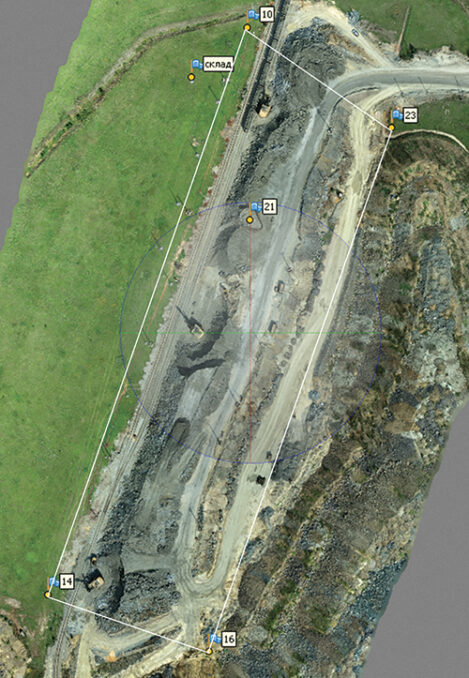
На подготовительном этапе работ были определены границы аэрофотосъёмки, точка взлёта и посадки. Было создано планово-высотное обоснование (ПВО), включающее 5 замаркированных опознаков (рис. 3), их расположение представлено на рис. 4. Это позволило в дальнейшем получить избыточность информации, которая использовалась для оценки технологической схемы.

В процессе полевых работ было выполнено определение координат опознаков и базы. Для этого использовался метод спутниковых определений в режиме кинематики (с фиксированным решением) относительно пунктов МОС предприятия.
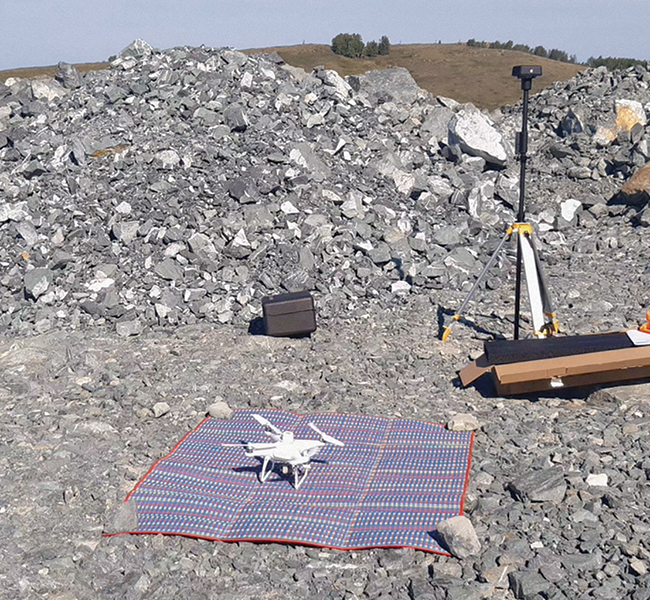
После проведения подготовительных полевых работ происходит сборка БПЛА и подготовка его к полёту (рис. 5). Для построения полётного задания используется приложение GS RTK [10]. В данном приложении осуществляется управление Phantom 4 RTK, составляется маршрут, регулируется степень наложения кадров, скорость, параметры камеры и т. д.
Выполнение полетного задания происходит в автоматическом режиме и требует только наблюдения за выполнением на экране, а также наблюдения за сигналом приема данных с БПЛА.
На последнем этапе проведена камеральная обработка результатов аэрофотосъемки (АФС) в программном продукте Agisoft Photoscan Metashape [11].
После обработки результатов проведено сравнение точности определения координат опознаков и базы, полученных по результатам аналитической фототриангуляции и геодезических работ [5].
В табл. 1 представлены расхождения и средние квадратические ошибки (СКО) планового положения (ошибка в плане) и высот (ошибка по высоте) опознаков и базы.

На основе сравнительного анализа данных, приведенных в табл. 1, установлено, что все результаты фототриангуляции отвечают требованиям к точности создания планов масштаба 1:500 с сечением рельефа 0,5–1 м. Однако при высоте полета 75 м требуются значительно большие временные затраты на съемку и обработку снимков, так как значительно увеличивается количество изображений. Поэтому оптимальными для аэрофотосъемки склада являются высоты 100 и 125 м.
Определение максимальной высоты полета произведем с учетом технических характеристик используемой фотокамеры. При использовании цифровых камер в качестве параметра, отвечающего за точность получаемой продукции, используется соотношение единицы растрового изображения с его линейным размером на земной поверхности (GSD) [3, 7].
Максимальная высота аэрофотосъемки для составления плана требуемого масштаба определяется из формулы [7]:
GSD = (Sw*H*100)/(Fr*imW),
где GSD — размер пикселя на местности, см/пиксель;
Sw — ширина сенсора фотокамеры, мм;
Н — высота полета, м;
Fr — фокусное расстояние фотокамеры, мм;
imW — ширина кадра, пикс.
В зависимости от масштаба плана была определена максимальная высота полёта, результаты представлены в таблице 2.

Согласно проведенному расчету, максимальная высота для получения плана масштаба 1:500 получилась 117,04 м, в связи с этим для условий склада оптимальной для съемки является высота 100 м.
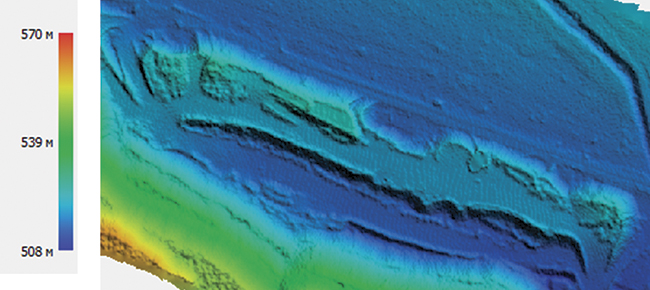
После проведения оценки точности фототриангуляции в программном продукте Agisoft Photoscan Metashape построена цифровая модель рельефа склада (рис. 6), используемая в дальнейшем при создании топографического плана масштаба 1:500 [11, 12].
На рисунке 7 представлено плотное облако точек, используемое в дальнейшем при создании каркасной модели объекта.

Таким образом, в соответствии с представленной технологиче-ской схемой были выполнены работы по созданию цифровой модели склада с применением квадрокоптера DJI Phantom 4 RTK + D-RTK 2 Mobile Station Combo.
В результате экспериментальной проверки технологической схемы создания цифровой модели поверхности складов с использованием БПЛА выявлены следующие особенности проведения работ:
1) необходимость использования замаркированных опознаков для контроля модели;
2) цифровые модели объектов, полученные с применением БПЛА, объективны (так как предоставляется изображение местности, а не векторные данные), их можно использовать для определения объемов;
3) использование БПЛА при проведении маркшейдерских работ позволяет выполнять их в кратчайшие сроки и обеспечивать требуемую точность выходных материалов.
Список литературы
1. Вьюнов М. В. Оценка использования возможности применения аэрофотосъемочных БПЛА для учета горных работ при добыче полезных ископаемых 2017. URL: http://config.com/files/pdf/презентации_2017/Вьюнов.pdf
2. Инструкция по топографической съемке в масштабах 1:5 000, 1:2 000, 1:1 000 и 1:500 / Главное управление геодезии и картографии при Совете Министров СССР. — М., Недра, 1982, 160 с.
3. Инструкция по фотограмметрическим работам при создании цифровых топографических карт и планов ГКИНП (ГНТА)–02-036-02 / Антипов И. Т., Беликов П. В., Зотов Г. А., Кучинский Ю. И., Лужбина Е. Я., Михайлов А. П., Нехин С. С., Хлебникова Т. Н. официальное изд. — М.: ЦНИИГАиК, 2002. — 100 с.
4. Коровин Д. С. Обоснование и разработка метода оценки объема угольного склада на основе аэрофотосъемки с применением беспилотных летательных аппаратов. — Кемерово, 2017. 110 с.
5. Методические рекомендации по производству аэрофототопографических работ с использованием беспилотных летательных аппаратов при изысканиях в целях строительства и реконструкции автомобильных дорог. ОДМ 218.9.017, 2019. — М., 2019.
6. Охрана недр и геолого-маркшейдерский контроль. Инструкция по производству маркшейдерских работ (РД 07-603-03). Сер. 07. Вып. 15/ Колл. авт. М.: Государственное унитарное предприятие «Научно-технический центр по безопасности и промышленности Госгортехнадзора России», 2003. 120 с.
7. Положение о геологическом и маркшейдерском обеспечении промышленной безопасности и охраны недр (РД 07-408-01), утверждено постановлением Госгортехнадзора России от 22.05.01 № 18.
8. Программное обеспечение DJI GO // компания DJI www.dji.com/ru
9. Программный продукт Agisoft Photoscan Metashape // компания Agisoft / https://www.agisoft.com/
10. Хлебникова Т. А., Опритова О. А. Экспериментальные исследования современных программных продуктов для моделирования геопространства // Вестник СГУГиТ. 2017. № 1.